Using Mission Control in the iNav configurator

First waypoint needs to be closer than 100m to the arming or home position.
This default distance of 100m (10000cm) can be changed in the CLI.
set nav_wp_safe_distance = 10000 (0 - 65000)
Can't arm if it's too far away. May be a safety feature so you dont load the wrong mission.
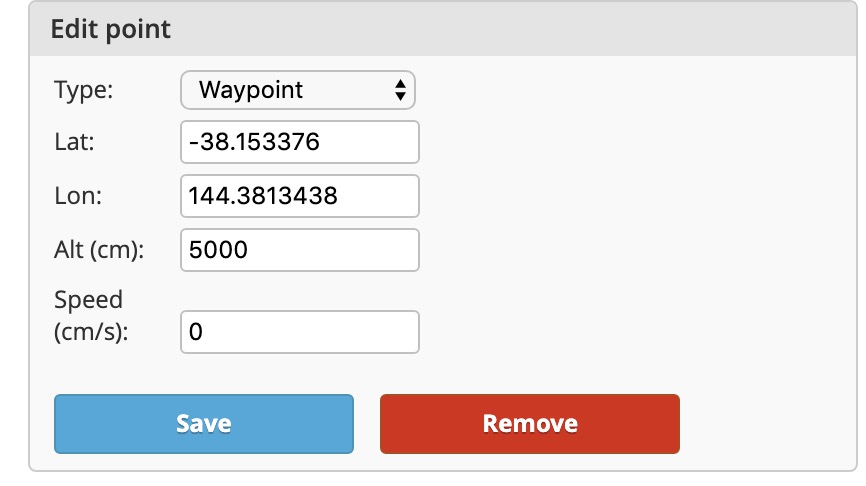
Default Alt and Speed for all waypoints can be preset using the little gear icon.
Note that Waypoint Speed is not used for fixed wing and rover missions (only used for multi rotors)
Fixed Wing and Rover both use Cruise Throttle to set the speed for missions. Cruise Throttle must be set high enough for safe RTH and Pos Hold flying.
Waypoint height is in cm (above the home altitude)
5000cm = 50m
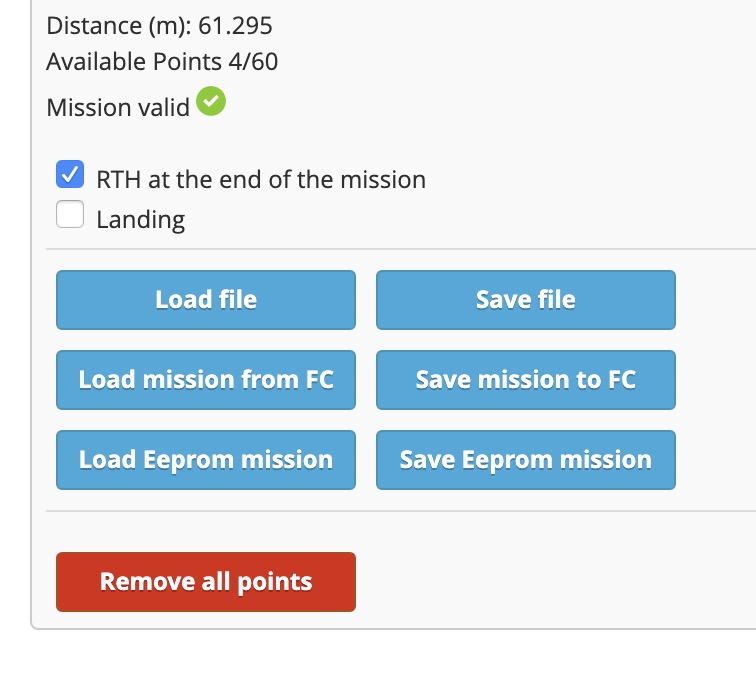
If you dont tick "RTH at end of the mission" the plane will loiter at the last waypoint using Pos Hold and Alt Hold.
Rovers need RTH and Landing ticked to stop when home position is reached.
Saving the mission
Save file (Saves the mission on to your computer or phone for later use)
Save Mission to FC (Temporarily saves mission to the FC. Mission is deleted when the FC is powered down)
Save Eeprom Mission (Saved to the FC until it is overwritten by the next Save Eeprom mission command)
Activating the mission
Before arming:
Stick command - Pitch UP and Roll RIGHT to make the mission available for this flight.
In the air:
Turn WP switch on while flying to activate the mission.
Turn WP switch off to end the mission and return to normal iNav control
Satellite view instead of drawn maps

Click on the little gear icon in iNav Configurator, top right, to change map providers.
Choose Bing Maps and enter your personal API key, then restart iNav Configurator and that's all.
OK, how do you get an API key? Quite easy really.
Here are the instructions, just the first section - https://github.com/iNavFlight/inav-configurator/blob/master/README.md#how-to-get-bing-maps-api-key
Just enter iNav as the application, nothing else required.
No comments:
Post a Comment