
4 rubber pads and 8 screws / bolts to remove the back

2 x Patch antennas

The two G and two 9V wires from the VTx can be combined into one G and one 9V for the FC HD FPV UART input.
Tx and Rx wires from the camera also go to the FC HD FPV UART. Camera ground wire not required when connected like this.






Video of my version with 185mm chord - https://www.youtube.com/watch?v=hL1W1PqLMDw
Here is how I arrange my OSD using Walksnail Avatar FPV gear and ELRS RC link.

Here are some suggestions for the best beginners RC and FPV gear in 2025.
I am recommending radios with EdgeTX operating system and ExpressLRS RF link for the best future proofing. This gear will be suitable for beginners and basic models right through to advanced users.
ExpressLRS has now matured enough to be a reliable RC link system with superior range and link security. I would recommend using an ELRS radio with ELRS receivers, then adding an external 4in1 Multiprotocol Module for non-ELRS receivers.
RC Gear
Transmitters

The antenna is fixed but able to rotate and fold away.
The screen is quite small which might be a problem for aging eyes.
Maximum output power of 250mW gives range of several km.

Output power of 1W gives range of tens of km.

Radiomaster ER PWM receiver range
The ER ELRS receivers have PWM pins for each channel and are designed to operate servos directly.
Range of several km is possible with the Pocket and Boxer radios.
4, 6 and 8ch receivers are available, some with a barometer for vario feedback and battery monitoring.
Radiomaster RP serial receiver range

The RP ELRS Serial receivers are designed for use with Flight Control Boards where a serial connection is required.
Serial connection means all 16 channels are sent down one wire.
Analog FPV Gear
The following gear is all standard definition analog because it is much cheaper than Digital HD. It is best to learn FPV using the cheaper analog systems then step up to digital later.
Goggles / Screen
The dual screen goggles like Skyzone or Fatshark are too expensive for beginners and it's best to save your money for future digital goggles purchase.

These are a good compromise between cost and features. The screen can be detached from the goggles and used just as a screen. It has built in DVR recording and dual antennas.
FPV cameras

This is my favourite analog FPV camera with 4:3 and 16:9 aspect ratio and great picture quality. The lens has a nice wide angle view.
There are many other camera options and anything similar will work for FPV as long as you pay attention to the required input voltage. Some cameras can only handle 5V and others can handle a wider range.
I prefer 16:9 aspect ratio and a wide angle lens (2.1 - 2.5mm) for use on fixed wing models.
Video Transmitters (VTx)
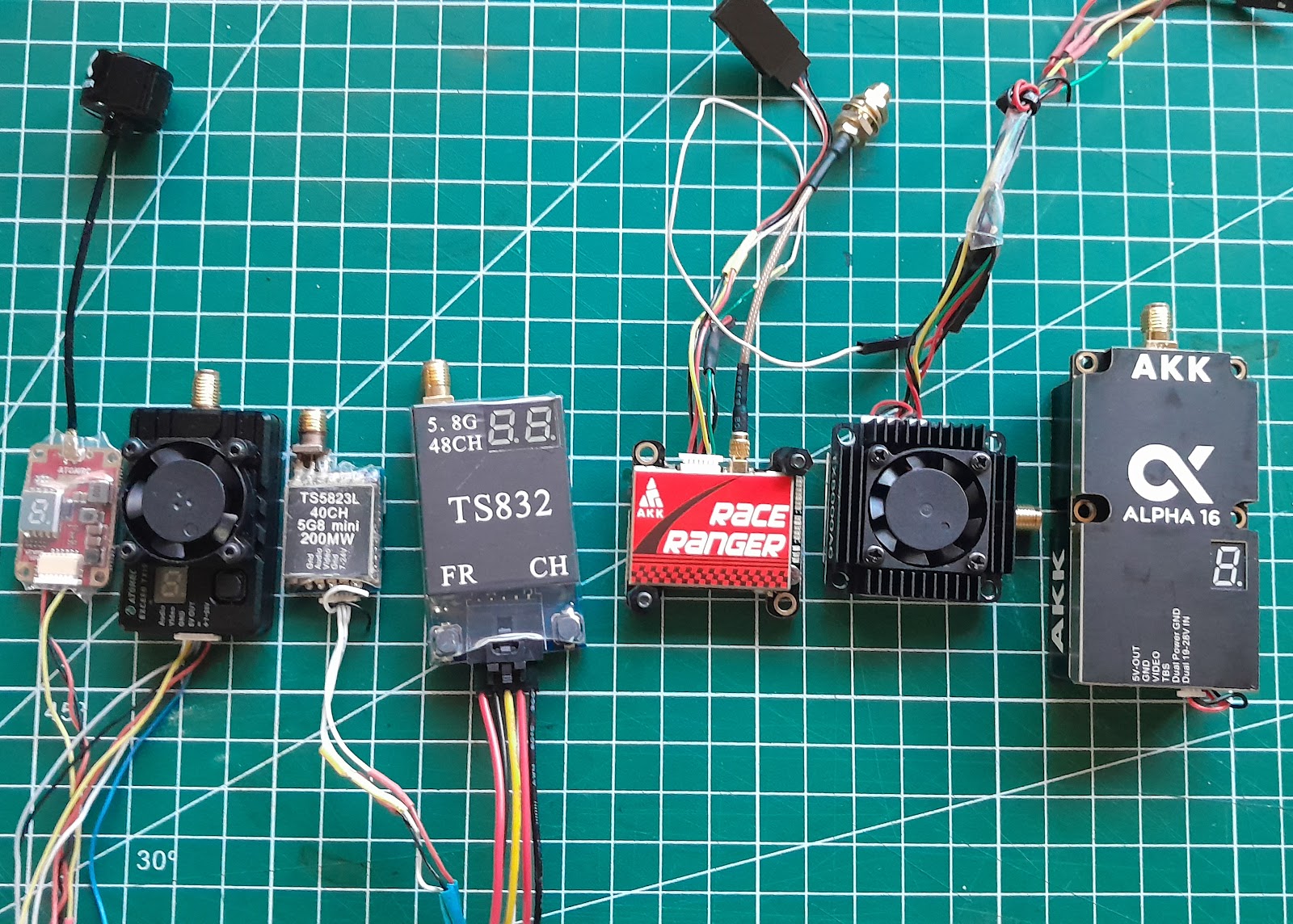
I would avoid the ultra high power VTx. More than 1W power is just not necessary for normal FPV.
Anything with 1W or less is all you need for a few km of range. More range is best achieved with a high mounted directional receiver antenna, rather than pumping out more power.
You may also need to buy an antenna for the VTx. Take note of the antenna connection style such as SMA, RP-SMA, MMCX, uFL.
Here are some suggestions

The cheapest and easiest entry to FPV is to use an AIO camera and VTx
They are not the best quality or range but you just have to supply power (usually 5V) and find the channel in your goggles.
They can also be easily swapped from model to model.
HD video cameras
For high quality onboard video recording here are some great options.

The Thumb cameras are small and light weight but can record excellent video. They don't have an internal battery and require 5V input to operate. This can come from the receiver or another 5V source.
They have a gyro built in and can record a motion data file to be used for Gyroflow stabilised video.
Runcam 2 4k

Here are my settings for GyroFlow with the Caddx Walksnail Moonlight @ 4K 30FPS on a Finwing XBird.
Using Gyroflow 1.5.4 because 1.6.0 didn't work with the Moonlight motion files at the time of this post.
Lens profile - Github lens profile list

Lens correction strength = 20% (reduced from default of 100%) to retain a wider view rather than totally correcting the fisheye.
The exported GyroFlow result is 4K 30fps but I have to make the Final Cut project 29.97fps to avoid jumpy video. I don't understand why but it works.
Video using the above settings.

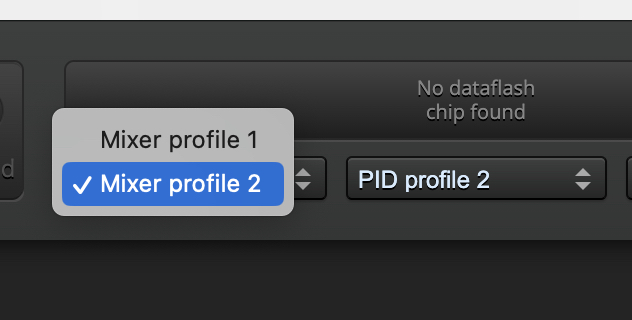
With Mixer Profile switching and a Transition mode we can now change between horizontal and vertical board alignments on the fly.
It is not yet perfect, lots of experimentation with PIDs and rates is required to make each different model work smoothly.
INAV VTOL doc - https://github.com/iNavFlight/inav/blob/master/docs/VTOL.md
Tailsitter initial setup tips
At this stage (INAV 7.1.2 June 2024) Tailsitter is not available as a platform choice so you need to enter this CLI command - Set tailsitter_orientation_offset = ON
This allows the board orientation to be horizontal for Mixer Profile 1 and vertical for Mixer Profile 2 with a 45º pitch forward transition mode.
Turn on "PID Profile will use same index...." so that the mixer and PIDs will match when switching Profiles.
Again turn on "PID Profile will use same index...."
Later we will need to alter the Quad X mixer settings depending on the fixed wing model we are using.
I am testing the AtomRC Theer wing and AtomRC Penguin.

Low channel value enables Profile 2 (VTOL), middle value adds the Transition Mode, high value switches to Profile 1 (level flight).
OK that covers the basics for all INAV tail sitters.
Now we need to make changes depending on the particular model, and play with the PIDs
AtomRC Theer Tailsitter settings
13th June 2024 - My Theer Tailsitter is now working OK for takeoff, hover, transition and level flight. I am having problems switching back to vertical and remaining stable.
Profile 1 - use a normal twin motor flying wing mix
Delete motors 3 and 4
Change Motor Roll values to 1, -1. Adjust directions as required to give the correct stabilisation direction..
Change Motor Pitch and Yaw values to 0, 0
Add elevon servo mixes and adjust directions and weights as required

Initially the Theer did not have enough pitch stability action to keep it vertical so I added more elevon area.
The preset Quad PIDs are incorrect for servo control so it's best to use values closer to Airplane PIDs for pitch and yaw, then adjust from there.
For more elevon action in Angle mode I increased the pitch P value until the servos started shuddering, then backed off a bit.
Then I increased the Level Pitch P value for more aggressive Angle mode pitch stability.
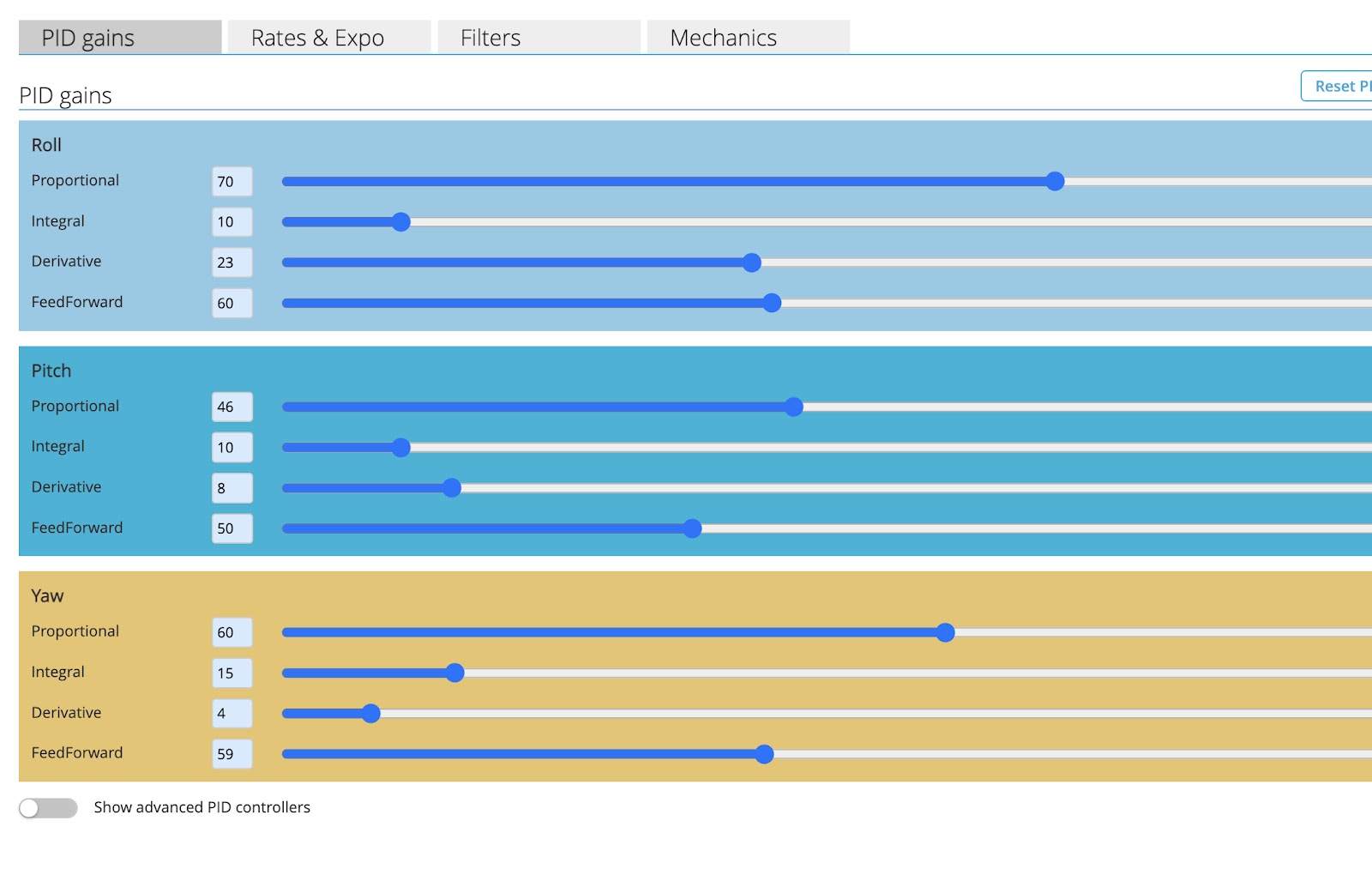
set mc_p_level = 40 (0 to 255) Default value is 20
Here is my latest Theer VTOL Diff_All file Use with caution.
AtomRC Penguin Tailsitter settings (Not yet tested)

Delete motors 3 and 4
Change Motor Roll values 1, -1. Adjust directions as required to give the correct stabilisation direction.
Change Motor Pitch and Yaw values to 0, 0
Add elevator and aileron servo mixes and adjust directions and weights as required
Try increasing the Level Pitch P value for more Angle mode pitch stability
set mc_p_level = 40 (0 to 255) Default value is 20
In VTOL mode Elevator controls Pitch as usual but Ailerons change to Yaw
WARNING - The INAV VTOL code is still being developed and is not yet complete.
My tailsitters are still fairly unreliable and I haven't added GPS yet. More tweaking is required.