
With Mixer Profile switching and a Transition mode we can now change between horizontal and vertical board alignments on the fly.
It is not yet perfect, lots of experimentation with PIDs and rates is required to make each different model work smoothly.
INAV VTOL doc - https://github.com/iNavFlight/inav/blob/master/docs/VTOL.md
Tailsitter initial setup tips
At this stage (INAV 7.1.2 June 2024) Tailsitter is not available as a platform choice so you need to enter this CLI command - Set tailsitter_orientation_offset = ON
This allows the board orientation to be horizontal for Mixer Profile 1 and vertical for Mixer Profile 2 with a 45º pitch forward transition mode.
Turn on "PID Profile will use same index...." so that the mixer and PIDs will match when switching Profiles.
Again turn on "PID Profile will use same index...."
Later we will need to alter the Quad X mixer settings depending on the fixed wing model we are using.
I am testing the AtomRC Theer wing and AtomRC Penguin.

In the Modes page - Configure Mixer Profile 2 and Profile Transition Modes using a channel which is operated by a 3 position switch.
Low channel value enables Profile 2 (VTOL), middle value adds the Transition Mode, high value switches to Profile 1 (level flight).
OK that covers the basics for all INAV tail sitters.
Now we need to make changes depending on the particular model, and play with the PIDs
AtomRC Theer Tailsitter settings
13th June 2024 - My Theer Tailsitter is now working OK for takeoff, hover, transition and level flight. I am having problems switching back to vertical and remaining stable.
Profile 1 - use a normal twin motor flying wing mix
Delete motors 3 and 4
Change Motor Roll values to 1, -1. Adjust directions as required to give the correct stabilisation direction..
Change Motor Pitch and Yaw values to 0, 0
Add elevon servo mixes and adjust directions and weights as required

Initially the Theer did not have enough pitch stability action to keep it vertical so I added more elevon area.
The preset Quad PIDs are incorrect for servo control so it's best to use values closer to Airplane PIDs for pitch and yaw, then adjust from there.
For more elevon action in Angle mode I increased the pitch P value until the servos started shuddering, then backed off a bit.
Then I increased the Level Pitch P value for more aggressive Angle mode pitch stability.
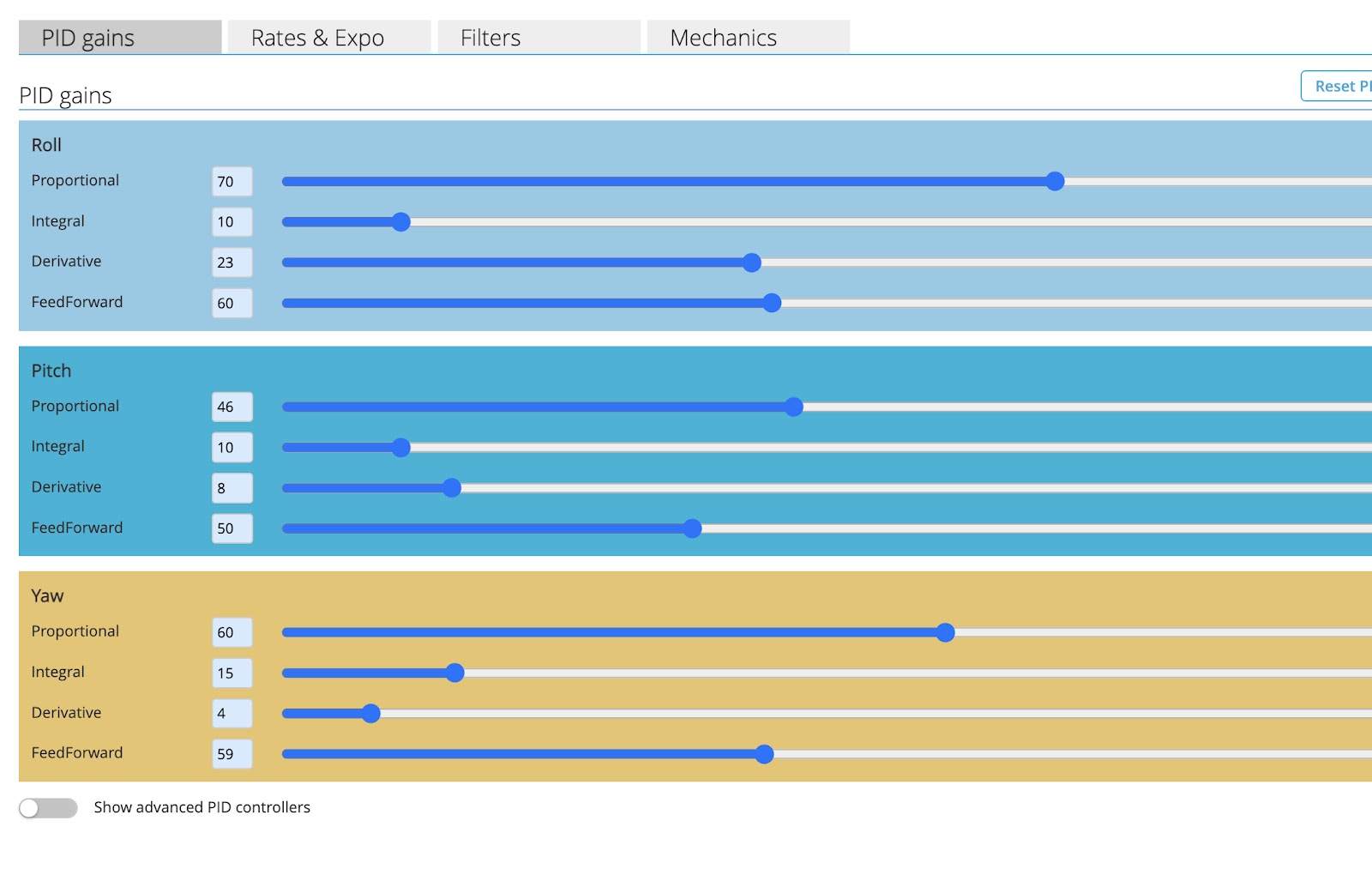
set mc_p_level = 40 (0 to 255) Default value is 20
Here is my latest Theer VTOL Diff_All file Use with caution.
AtomRC Penguin Tailsitter settings (Not yet tested)

Delete motors 3 and 4
Change Motor Roll values 1, -1. Adjust directions as required to give the correct stabilisation direction.
Change Motor Pitch and Yaw values to 0, 0
Add elevator and aileron servo mixes and adjust directions and weights as required
Try increasing the Level Pitch P value for more Angle mode pitch stability
set mc_p_level = 40 (0 to 255) Default value is 20
In VTOL mode Elevator controls Pitch as usual but Ailerons change to Yaw
WARNING - The INAV VTOL code is still being developed and is not yet complete.
My tailsitters are still fairly unreliable and I haven't added GPS yet. More tweaking is required.
No comments:
Post a Comment